
덤
- 오버홀(overhaul)은 설비의 주요 부품을 분해하여 점검, 청소, 교환, 조정 등을 실시하는 작업으로, 설비의 성능을 회복하고 고장을 예방하기 위한 활동입니다. 따라서, 오버홀은 예방보전활동에 포함됩니다.
- 화이트노이즈: 모든 주파수가 뒤섞인 진동. 주파수 그래프로 그리면 수평선이 된다.
- 이건 기억하고 가세요 주파수는 단위 시간 당 진동 수.
- 진동 측정 장비의 고정 IP는 192.168.0.10이고, 측정할 PC는 192.168.0.200으로 IP가 설정되어야 한다.
설비보전의 표준화 전략
- 설비에서는 ‘보존’이라고 하지 않는다. 보존은 물건 자체를 관리하는 걸 말한다. 대상을 그 고유의 상태 그대로 유지하도록 한다. 보전이라는 건 어떤 상태를 유지 관리하는 것이다. 설비가 운전되는 상태를 유지하고 관리할 수 있도록 관리한다는 말임.
- 설비보전의 인식 전환
- 기계는 자원이다
- 설비보전의 중요성
- 설비보전 비용은 총생산비용의 15~40%
- 순이익 측면에서 설비보전비 20% 저감은 총매출 70% 증가와 같음
- 인건비, 수리비, 재고 금융비, 다운타임 손실, 감가상각비 등이 해당함
- 설비보전 기술의 인식전환
- 이건 고장을 조기에 발견하거나 수리하는 기술이 아님 → 완벽한 기계를 라인에 투입하면 고장날 이유가 없어요
- 이건 일종의 투자다: 설비비 10% 투자하면 수명이 2배 이벤트
- 개발도상국이 선진국이 되려면 꼭 해야 함: 기계 죽을 때까지 A/S로 5배를 번다
- (신일본제철) “제1공무부장은 누가 될지 모르지만 차기 공장장은 반드시 제1공무부장이 된다” ← 공무부장이 뭔지 몰라서 어떤 느낌의 말인지 못알아들었음
- 기계 수명의 인식 전환
- 기계는 사실 불사임: 24시간 가동 설비 평균 수명 25~70년
- 기계 고장은 사실 베어링 고장임: 베어링 적정 수명은 25년(300개월)
- 진동에 관하여
- 진동은 기계의 언어
- 기계 상태를 나타내는 가장 예민하고 정확한 factor
- 진동이 감시와 진단의 기본이며 다른 기술은 더블체크 용도임
- 진동 = 고장?
- 관계가 있는거지 고장 자체는 아님
- 진동만 쳐다볼 게 아니라 그게 왜 생겼는지를 보라는 거임
- 고장은 특정 고장에 의해 반응하는 모니터링 factor를 고장이라 해야 한다
- 고장때문에 → 진동이 생기는 거다 선후관계 똑바로 알기
- 관계가 있는거지 고장 자체는 아님
- 단위마다 의미가 다름
- 변위: 멀미나게 흔들려
- 속도: 부하(에너지)가 크다
- 가속도: 쳐맞는소리(충격) → 부품 손상과 밀접함
- 어떤 고장을 보고 싶은지에 따라 선택하는 거임
- 진동은 기계의 언어
- 터빈은 예지보전 이전에 주기적으로 다 바꾸고 관리하고 한다(overhaul? 한다 했음)
- 오버홀은 설비의 주요 부품을 분해하여 점검, 청소, 교환, 조정 등을 실시하는 작업으로, 설비의 성능을 회복하고 고장을 예방하기 위한 활동입니다. 따라서, 오버홀은 예방보전활동에 포함됩니다.
- 설비의 도입
- 완벽한 설비 투입
- 고장을 예지하는 것보다는 완벽한 상태의 기계를 도입하면 문제가 없어
- 설계, 제작에 문제가 없고 운전이 과하지 않다면 24시간 운전해도 25년은 가
- 인증시험은 설비보전에서 반드시 해야 할 고유업무이며 가장 중요한 프로세스임
- 인증시험 내용
- 설계(약한 베어링, 기어 잇수 공약수 등), 설치, 조립, 가공(헐거움 등), 부품상태 분석
- foundation은 최소 기계 무게 5배
- 이상한 데에 탄성체/충격흡수재(isolator) 넣지 않기
- notch: 눈금 or 절취선(예: 초콜릿 자르라고 파인 부분). 이런 게 축에 있으면 제일 먼저 부러지겠죠? → 똑바로 감시하라는 말임
- 각 원인에 관한 감시 factor와 승인 조건 및 측정 조건, 방법에 관한 매뉴얼이 요구됨
- 설계(약한 베어링, 기어 잇수 공약수 등), 설치, 조립, 가공(헐거움 등), 부품상태 분석
- 완벽한 설비 투입
- 감시
- 언제 정밀진단을 하면 좋을지 정하기 위한 관찰임
- 돌발고장이 나면 감시를 똑바로 안 한 거임
- 뭘 감시?
- 고장 원인을
- 진동을 감시할 경우 경고가 울리면 반드시 전문가 부르기 → 이 전문가가 병목구간임
- 감시 factor의 설계(고장 원인 스펙트럼)
- 모든 고장 원인을 나열하고 그 각각에 반응하는 factor를 찾아 설계하는 것
- 똑바로 감시하면 감시가 진단을 포함하니 따로 진단을 할 필요가 없다
- 수리
- 제일 중요한 건 애초에 똑바로 된 설비를 도입하는 것
- 수리는 소프트풋 → alingment → 밸런싱 순서로
- 설비보전 시스템
- 설비 도입
- 도입설비 검증 시스템
- 감시 - 이상 유무 판정
- 감시 시스템의 선정
- 감시 대상 설비의 선정
- 감시 주기 설정
- 센서선정 및 부착 위치/방법
- 감시 factor 선정 및 설계
- 경고 수준 설정
- 경고수준에 따른 행동지침
- 감시 보고서 및 보고체계
- 진단 - 이상 원인 규명
- 적절한 장비 선택 및 설정
- 적절한 센서 선택 및 측정
- 구조물 및 배관 진동 분석
- 고장분석 능력 및 향상방법
- 전문인력 양성과 인원 확보
- 진단보고서 양식의 표준화
- 진동 이외의 기술적용
- 수리
- 소프트풋 수행 표준
- alignment 수행 표준
- 밸런싱 수행 표준
- 수리결과 검증 시스템
- 설비 도입
- 시스템의 관리
- 모든 설비는 감시 대상임
- 진동관리 표준절차서는 마치 like 헌법
- CMS(Condition Monitoring System): 통상적으로 설비의 예지보전이 목적인 시스템. 상시 감시가 첫 번째. 기본적으로 위험 속도 이내 범위에서 운전하는 설비를 관리하는 데 사용한다
- 기본적으로 위험 속도의 2/3 만큼만 운전하기. 넘어가면 공진 위험.
- TSI(Turbine Supervisory Instrumentation): 터빈 전용 관리 시스템. 터빈은 위험속도를 2번이나 넘어가서 운전되기 때문에 운전할 때도 위험하지만 정지할 때도 위험함.
- 모니터링 factor 설계
- 어떤 부품을 감시하고 싶은지에 따라 고장 원인/유형이 다 다르고 그걸 감시할 수 있는 수치를 정하는 것
- 알람 레벨 설정
- 알람 기준치는 평소 안전하게 운영되는 수치의 2배 이상으로 정하기 때문에 무시하면 안돼요
- 트립: 긴금정지. 통상 기준치 10배.
진동의 기초
- 가진력은 외부에서 진동을 가하는 힘 → 이에 대한 응답이 진동
- 가진력의 대표적인 예시가 언밸런스와 misalignment
- 시스템의 동적 특성
- 같은 힘을 가한다 칠 때 무거우면(질량) 덜 진동한다. 근데 회전체는 무거울수록 더 진동한다. 가속도와 큰 관계가 있음.
- 강성은 탄성에 의해 결정된다. 얼마나 단단한지. 하중 대비 처짐으로 측정 가능. 변위가 가장 큰 관계가 있음.
- 감쇠는 진동 에너지를 소산시키는 정도. 속도와 관련됨.
- 회전현상
- 원심력(진동)은 $F=m \cdot r \cdot \omega^2$
- $m$은 불평형량
- $r$은 중심에서 불평형량까지의 거리
- $\omega^2$은 속도. 제곱에 비례하기 때문에 조금만 올려도 진동이 확 커질 수 있다.
- 자전: 내가 돌아감. 원심력에 의해 진동이 발생함. 회전체 자체에 편심력이 존재하기 때문에 생길 수밖에 없고 그게 가진력이자 언밸런스임. 휘돌림과는 약간 다르지만 좀 비슷함.
- 휘돌림: 자전과 공전을 같이 함. 처짐과 유사하게 축이 휘게 됨.
- 비틀림
- 구동력이 전달되는 시간적 차이에 의해 발생된다.
- 원동기에 가까운 쪽은 원동기에 의해 회전하고자 하지만 먼 쪽은 순간적으로 멈추어 있다가 회전력과 순간적인 비틀림에 의해 가까운 쪽보다 오히려 먼저 회전하게 되는 현상
- 특징
- 특정한 속도에서 이 비틀림 현상이 매우 강조된다. (비틀림 위험속도)
- 자동차의 크랭크 샤프트와 같이 자주 변속 되는 경우
- 연마기와 같이 질량이 큰 원판이 부착된 경우
- 심한 경우 축이 칼로 자른 듯이 절단되는 위험한 경우가 발생할 가능성이 있어 특별한 주의가 요구되기도 한다.
- 떨림
- 회전체 진동과 별도로 발생되는 국부적인 현상
- 베어링 손상, 기어의 손상 또는 유체저항 등이 그 주요 원인으로 분석되고 있다.
- 특징
- 설비의 진단의 정확성은 떨림 현상을 얼마나 정확히 측정하고 분석할 것인가에 달려 있다.
- 주파수를 분석함으로써 그 원인을 정확히 분석할 수 있고, 원인제거가 가능하다.
- 회전현상은 매우 복잡하고 다양한 형태를 나타내며, 그 원인에 따라 차이는 있으나 상기의 5가지 현상이 동시에 발생되고 있다.
- 회전현상을 시간적으로 분류하면, 최초 자중에 의해 처짐(Sagging)이 발생하고 있는 회전축은 회전(Spinning)이 시작되면서 처짐 량이 어느 정도 복원 되고, 회전속도가 증가함에 따라 원심력에 의한 공전(Whirling)이 발생된다. 가동 중 변속 될 경우 축의 비틀림 (Torsion)이 발생되며, 속도에 따라 공전(Whirling)의 크기가 민감하게 변화 한다.
- 원심력(진동)은 $F=m \cdot r \cdot \omega^2$
- 가진력이 곧 진동인가? 아님. 중간에 전달함수(강성, 질량, 감쇠)가 끼어서 직접적으로 동일한 것은 아님
- 위험속도는 $\omega_{CR}$(critical)로 표기한다. 통상적으로 이 속도의 70~75% 이내 범위에서 운전할 것.
진동의 3요소
- 주파수
- 주파수의 단위 - cps: cycle per sec, cpm: cp-min → 요즘 잘 안 씀
- Order, X: 기준 주파수라고 보면 됨. 30Hz로 회전하는 회전체의 1 Order, 1X는 30Hz
- 주파수가 왜 중요한가? 성질이 바뀌지 않기 때문. 실로폰 도레미 치면 항상 똑같이 도레미 주파수가 나온다.
- 진폭
- 진동의 크기, 진동의 정도
- 변위: 얼마나 덩어리째로 흔들리고 있는지. 기준점이 없기 때문에 피크-피크(최소점~최대점) 단위를 쓴다. 센서에 영점이 없어. 나머지 값들은 0-피크를 쓴다. 주로 마이크로미터 per sec 단위
- 속도: 얼마나 세게 흔들리고 있는지. 주로 mm per sec 단위
- 가속도: 얼마나 맞고다니는지. 주로 중력가속도 = $m/s^2$
주파수
- 진동하는 시스템의 강성이 강할수록 고주파를 발생시키고, 약하고 유연할수록 저주파가 발생한다
- 손과 귀로 동시에 느낄 수 있는 주파수: 20~100Hz (1200~6000rpm)
주기
- 한 사이클의 진동이 이루어지는 데 걸리는 시간
- 단위: sec 또는 msec. 1 sec = 1000 msec
- 주파수와 주기의 관계
- 주파수 f는 주기의 역수 ($f = \frac{1}{T}$)
- T: 시간. 사이클 당 시간
- f: 1/T. 초당 사이클 (CPS)
- N(회전 수): 분당 회전 수 = 60f (CPM)
- 예를 들어 1사이클이 0.0329초(32.9ms)라고 하자(=주기). 그렇다면 주파수는 $1000 / 32.9 = 30$Hz 정도 나온다.
- 이걸 주파수 그래프로 바꾸면 x축 30Hz 자리에 6만큼의 높이(그래프에 나와 있었음)로 피크가 찍히는 거임
- 330Hz인 물체의 시간 그래프는 어떻게 그리겠나? 1000ms 동안 주기가 330번 지나가게 그리면 됨.
- 복합파형의 주파수 표시
- 여러 주파수가 섞이면 그게 다 합성된 파형이 그려진다. 눈으로 구분이 어찌저찌 가능하긴 한데 실전에서는 그것도 안되니까 FFT를 하는거다
- 진폭은 에너지의 크기를 측정한 값. amplitude.
- p-p: 주로 변위에서 사용
- 0-p: 진동 속도와 가속도 지표
- rms: 에너지 대푯값
- 한쪽으로 하중이 몰리면 진동 파형이 좀 찌그러진다. 한쪽은 크고 한쪽은 작게 나옴
- 가속도 (A) $\xrightarrow{\text{적분}}$ 속도 (V) $\xrightarrow{\text{적분}}$ 변위 (D)
- 단위 간의 상호 환산을 알면 진동은 사칙연산 문제가 될 뿐
- 진동 얘기 하는데 너무 졸림 문제도 풀어야 한다는 게 믿기지 않을 따름임
데이터 수집
- 주파수의 시간 영역 그래프(raw 진동)를 time wave form이라고 부른다
- 진동의 요인(가진력): 불평형, 충격, 마찰, 소음 등. 기계에서는 불평형이 제일 크다.
- 질량, 강성, 감쇠의 전달함수를 거쳐 변위, 속도, 가속도 진동으로 도출됨 → 이 도출되는 자리가 베어링 하우징이라는 거임
- 강성이 크면 변위가 작아진다. 단단하기 때문에 변화량이 적은 거임. 변위 = 강성 * 변화량
- 좀 큰 단위의 움직임을 보는 데에 적당함
- 속도 = 힘 * 감쇠
- 전 주파수 범위에서 1mm/s로 진동이 일정한 경우 159Hz에서 진동 속도가 1m/s일 때, 변위는 1마이크로미터, 진동가속도는 $1m/s^2$이다
→ 딱 이 지점을 전후로 왼쪽은 변위가 더 잘보이고 오른쪽은 가속도가 더 잘보인다는 말임 - 변위 속도 가속도를 한번에 그래프로 그려보면 셋 중에 하나는 그래프가 좀 평탄하게 제일 무난하게 생긴 게 있을거임. 그걸 골라서 보는 게 측정변수 선택임.
- 속도는 변위보다 90도 빠르고, 가속도는 변위보다 180도 빠름
- 축 방향 어렵다 전체적인 정리가 좀 필요함
- 베어링 하우징 : 회전체에서 발생되는 가진력이 전달됨, 따라서 기계 상태의 변화를 나타내기 가장 좋음
- 수평 방향 : 일반적인 기계 결함 판단
- X: 일반적인 기계 결함 파악에 적당함. 이 축이 Y축보다 몇 배로 크게 흔들리면 각종 정렬 문제 의심됨: 소프트풋, 얼라인, 밸런싱
- 수직 방향 : 베어링 손상, 공진 여부 판단
- Y: 베어링이 받는 부하를 측정하기에 적당함. 이 축이 X축보다 3~5배 이상 흔들리면 공진을 의심
- 축 방향 : 추력을 받는 경우(angular contact bearing, 스퍼 기어를 제외한 기어들)
- Z: 축 방향으로 하중을 받는 베어링이 있다. 스러스트 베어링이라고 당연히 힘을 받는 방향으로 측정해야 한다
![]()
- Z: 축 방향으로 하중을 받는 베어링이 있다. 스러스트 베어링이라고 당연히 힘을 받는 방향으로 측정해야 한다
- 변위계와 같이 붙는 속도계는 변위계랑 같이(변위계 위에) 붙여야 한다. 절대진동을 측정해서 빼야 하기 때문
- 디젤 엔진은 유막 베어링인데도 변위계가 아니라 가속도계를 쓰는 이유
- 고주파라서
- 애초에 회전하는 방식의 베어링이 아님. 축이랄 게 없음. 왕복 운동 하는 엔진이니까.
- 유막 베어링
- 오일이 너무 많으면 휘돌림이 발생함
- 오일이 너무 적으면 의미가 없음
- 축에 노치가 있는 이유: 눈금임. 한 바퀴 돌아와서 센서를 다시 지나갈 때마다 한바퀴 돈 것을 구분할 수 있게 하는 거임. key phaser라고 함.
- 가속도계에 영향을 미치는 조건
- 온도: 압전소자가 온도 영향을 좀 받음
- 자장(전자기): 동전식 속도계는 안에 자석 들어있으니 당연히 문제가 되겠죠?

진동 단위 변환 문제 (W. Gemini)
[예제 1.1] 진동 변위의 속도 변환 해설
제공해주신 이미지 파일은 진동 변위(Displacement)를 진동 속도(Velocity)로 변환하는 공학 계산 예제입니다. 해당 문제에 대한 단계별 해설입니다.
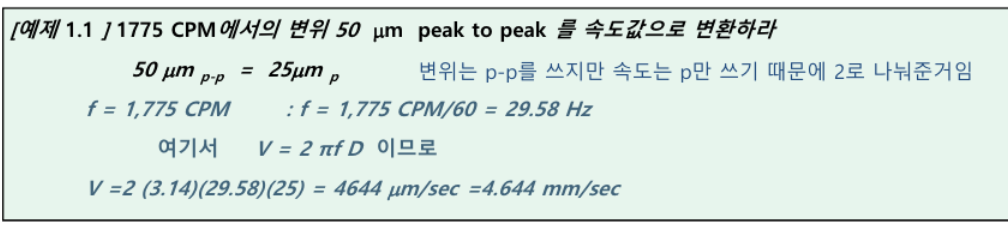
이 문제는 주파수(f)와 변위(D)가 주어졌을 때, 단순 조화 운동(Simple Harmonic Motion)의 이론을 바탕으로 속도(V)를 계산하는 과정을 보여줍니다.
- 변위 단위 변환 (Peak-to-Peak → Peak)
- 주어진 값: $50 \mu m \text{ p-p}$ (Peak-to-Peak, 양진폭)
- 변환: 속도 계산 공식에는 진동의 중심에서 최대치까지의 거리인 편진폭(Peak, $0-p$)을 사용해야 합니다.
계산:
\[D_{peak} = \frac{D_{p-p}}{2} = \frac{50 \mu m}{2} = 25 \mu m\]
- 주파수 단위 변환 (CPM → Hz)
- 주어진 값: $1,775 \text{ CPM}$ (Cycles Per Minute, 분당 회전수)
- 변환: 표준 단위계(SI)인 초당 진동수(Hz)로 변환해야 합니다.
계산:
\[f = \frac{1,775}{60} \approx 29.58 \text{ Hz}\]
- 속도 계산 공식 적용
- 단순 조화 운동에서 최대 속도 V는 각진동수($\omega = 2\pi f$)와 변위 진폭(D)의 곱으로 표현됩니다.
공식:
\[V = 2 \pi f D\]대입:
이미지에서는 원주율($\pi$)을 3.14로 근사하여 계산했습니다.
\[V = 2 \times 3.14 \times 29.58 \text{ Hz} \times 25 \mu m\]
- 최종 결과 산출
계산 결과:
\[V = 4,644 \mu m/sec\]단위 환산 (mm/sec):
$1,000 \mu m = 1 mm$ 이므로,
$V = 4.644 mm/sec$
요약:
이 예제는 Peak-to-Peak 변위를 절반으로 나누어 Peak 값으로 바꾸고, 분당 회전수(CPM)를 60으로 나누어 주파수(Hz)로 바꾼 뒤, $V=2\pi f D$ 공식에 대입하여 속도를 구하는 과정입니다.
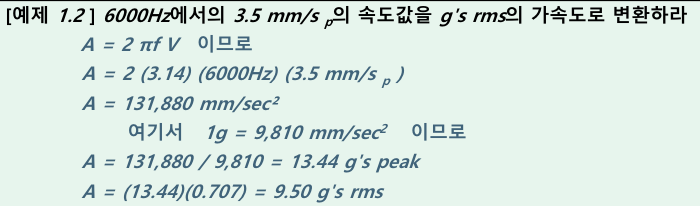
[예제 1.2] 진동 속도의 가속도(g’s rms) 변환 해설
제공해주신 이미지 파일은 진동 속도(Velocity)를 진동 가속도(Acceleration)로 변환하고, 이를 다시 표준 중력 단위(g)의 실효값(RMS)으로 환산하는 공학 계산 예제입니다.
해당 문제에 대한 단계별 해설입니다.
이 문제는 주파수(f)와 속도(V)가 주어졌을 때, 가속도(A)를 계산하는 과정입니다. 입력된 속도 값이 Peak(편진폭) 단위이므로, 계산된 가속도 역시 Peak 단위가 되며, 이를 최종적으로 RMS(실효값)으로 변환해야 합니다.
- 기본 가속도 계산 (속도 → 가속도)
- 주어진 값:
- 주파수 (f) = $6,000 \text{ Hz}$
- 속도 ($V_{peak}$) = $3.5 \text{ mm/s}_{p}$
공식: 단순 조화 운동에서 가속도는 속도에 각진동수($\omega = 2\pi f$)를 곱하여 구합니다.
\[A = 2 \pi f V\]계산: (원주율 $\pi \approx 3.14$ 적용)
\[A = 2 \times 3.14 \times 6,000 \text{ Hz} \times 3.5 \text{ mm/s} = 131,880 \text{ mm/s}^2\]- 이 값은 속도가 Peak 단위였으므로, Peak 가속도입니다.
- 단위 변환 (Metric → Gravitational Unit)
- 변환 기준: 표준 중력가속도 $1g$는 약 $9,810 \text{ mm/s}^2$ ($9.81 \text{ m/s}^2$)입니다.
계산:
\[A_{(g)} = \frac{131,880 \text{ mm/s}^2}{9,810 \text{ mm/s}^2/g} \approx 13.44 \text{ g's peak}\]
- Peak 값을 RMS 값으로 변환
원리: 정현파(Sine wave)에서 실효값(RMS)은 최대값(Peak)의 $\frac{1}{\sqrt{2}}$ 배입니다.
\[\frac{1}{\sqrt{2}} \approx 0.707\]계산:
\[A_{(rms)} = 13.44 \text{ g's peak} \times 0.707 = 9.50 \text{ g's rms}\]
요약:
이 예제는 $A=2\pi f V$ 공식을 사용하여 가속도를 구한 후, 이를 중력가속도(g) 단위로 나누고, 마지막으로 0.707을 곱하여 Peak 값을 RMS 값으로 보정하는 과정입니다.
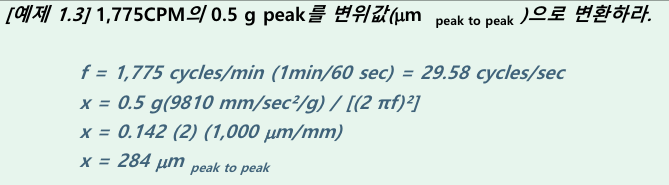
[예제 1.3] 가속도(g peak)의 변위(peak-to-peak) 변환 해설
제공해주신 이미지 파일은 진동 가속도(Acceleration)를 진동 변위(Displacement)로 변환하는 공학 계산 예제입니다. 이 과정은 앞서 논의한 “적분(나눗셈)” 과정을 포함합니다.
해당 문제에 대한 단계별 해설입니다.
이 문제는 주파수(f)와 가속도(A)가 주어졌을 때, 변위(x 또는 D)를 계산하는 과정입니다. 입력된 가속도는 Peak(편진폭) 단위이며, 최종 결과는 Peak-to-Peak(양진폭)으로 변환해야 합니다.
- 주파수 단위 변환 (CPM → Hz)
- 주어진 값: $1,775 \text{ CPM}$ (Cycles Per Minute)
- 변환: 초당 진동수(Hz)로 변환합니다.
계산:
\[f = \frac{1,775}{60} \approx 29.58 \text{ Hz}\](이미지에서는
29.58 cycles/sec로 표기되었습니다.)
- 가속도 단위 변환 (g → Metric)
- 주어진 값: $0.5 \text{ g peak}$
- 변환: 표준 단위인 $mm/s^2$로 변환해야 계산이 가능합니다. ($1g = 9,810 mm/s^2$)
계산:
\[A = 0.5 \times 9,810 = 4,905 \text{ mm/s}^2\]
- 변위 계산 공식 적용 (이중 적분 효과)
- 원리: 가속도에서 변위로 가려면 $2\pi f$로 두 번 나누어야 합니다. (가속도 → 속도 → 변위)
공식:
\[x_{peak} = \frac{A}{(2\pi f)^2}\]계산:
\[x_{peak} = \frac{0.5 \times 9,810}{(2 \times 3.14 \times 29.58)^2}\]분모인 $(2\pi f)^2$을 먼저 계산하면 약 $(185.76)^2 \approx 34,506$ 입니다.
\[x_{peak} \approx \frac{4,905}{34,506} \approx 0.142 \text{ mm}_{peak}\]
- 최종 단위 변환 (Peak → Peak-to-Peak & mm → \mu m)
- Peak → Peak-to-Peak: 변위는 보통 전체 흔들림 폭(p-p)으로 나타내므로 2를 곱합니다.
- mm → $\mu m$: 미세한 진동을 표현하기 위해 마이크로미터($1 mm = 1,000 \mu m$)로 환산합니다.
최종 계산:
\[x_{p-p} = 0.142 \text{ mm} \times 2 \times 1,000 \mu m/mm\] \[x_{p-p} = 284 \mu m \text{ peak-to-peak}\]
요약:
이 예제는 가속도를 $(2\pi f)^2$으로 나누어 변위(Peak)를 구하는 핵심 과정을 보여줍니다. 그 후, 단위 환산($mm \rightarrow \mu m$)과 진폭 표현 방식 변경($Peak \rightarrow p-p$)을 통해 최종 답을 도출했습니다.
가속도에서 변위로 갈 때 $2\pi f$의 제곱으로 나누는 이유가 명확히 이해되셨습니까?
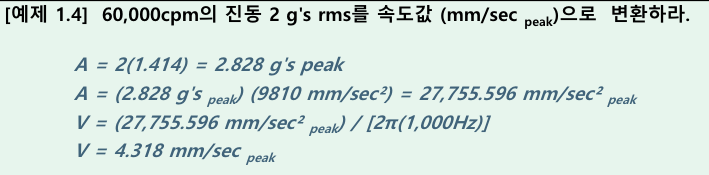
[예제 1.4] 가속도(RMS)의 속도(Peak) 변환 해설
제공해주신 이미지 파일은 진동 가속도(RMS)를 진동 속도(Peak)로 변환하는 공학 계산 예제입니다.
해당 문제에 대한 단계별 해설입니다.
이 문제는 가속도(A)에서 속도(V)로 변환하는 ‘적분(나눗셈)’ 과정을 다룹니다. 특히 입력값이 실효값(RMS)으로 주어졌기 때문에, 이를 편진폭(Peak)으로 먼저 변환하는 과정이 포함되어 있습니다.
- 주파수 단위 변환 (CPM → Hz)
- 주어진 값: $60,000 \text{ CPM}$
계산: 분당 회전수를 초당 진동수로 변환합니다.
\[f = \frac{60,000}{60} = 1,000 \text{ Hz}\]
- 가속도 값 변환 (RMS → Peak)
- 원리: 속도 계산 공식($V = A / 2\pi f$)은 정현파의 진폭(Peak)을 기준으로 유도된 식이므로, RMS 값을 Peak 값으로 변환해야 합니다.
- 공식: $Peak = RMS \times \sqrt{2} \approx RMS \times 1.414$
계산:
\[A_{(peak)} = 2 \text{ g's rms} \times 1.414 = 2.828 \text{ g's peak}\]
- 가속도 단위 변환 (g → Metric)
- 원리: 표준 단위($mm/s^2$)로 변환하여 계산합니다. ($1g = 9,810 mm/s^2$)
계산:
\[A = 2.828 \times 9,810 = 27,755.596 \text{ mm/s}^2 \text{ peak}\](참고: 이미지의 계산 결과는 소수점 처리 방식에 따라 단순 곱셈 값과 미세한 차이가 있을 수 있으나, 제시된 수치를 그대로 따릅니다.)
- 속도 계산 (가속도 → 속도)
- 원리: 가속도에서 속도로 변환하려면 각주파수($2\pi f$)로 한 번 나누어줍니다(적분).
공식:
\[V = \frac{A}{2 \pi f}\]계산:
\[V = \frac{27,755.596}{2 \times \pi \times 1,000}\] \[V \approx \frac{27,755.596}{6,283} \approx 4.318 \text{ mm/s peak}\]
요약:
이 예제는 RMS 가속도를 Peak 가속도로 변환($\times 1.414$)하고, 단위를 맞춘 뒤($\times 9,810$), 주파수 성분으로 나누어($/ 2\pi f$) 속도를 구하는 과정입니다.
RMS 값을 Peak로 먼저 변환해야 하는 이유와 계산 과정이 이해되셨습니까?
[예제 1.5] 속도(RMS)의 가속도(g’s peak) 변환 해설
제공해주신 이미지 파일은 진동 속도(RMS)를 진동 가속도(Peak)로 변환하는 공학 계산 예제입니다.
해당 문제에 대한 단계별 해설입니다.
이 문제는 주파수(f)와 속도(V)가 주어졌을 때, 가속도(A)를 계산하는 과정입니다. 입력된 속도 값이 RMS(실효값)이므로, 이를 먼저 Peak(편진폭)으로 변환한 뒤 가속도로 변환해야 합니다.
- 주파수 단위 변환 (CPM → Hz)
- 주어진 값: $120,000 \text{ CPM}$
계산: 분당 회전수를 초당 진동수로 변환합니다.
\[f = \frac{120,000}{60} = 2,000 \text{ Hz}\]
- 속도 값 변환 (RMS → Peak)
- 원리: 가속도 변환 공식($A = 2\pi f V$)은 정현파의 진폭(Peak)을 기준으로 하므로, RMS 속도를 Peak 속도로 변환해야 합니다. ($Peak = RMS \times \sqrt{2}$)
계산:
\[V_{peak} = 5.0 \text{ mm/sec rms} \times 1.414 = 7.07 \text{ mm/sec}_{peak}\]
- 가속도 계산 및 단위 변환 (속도 → 가속도 → g)
- 원리: 속도(V)를 미분(곱셈)하여 가속도(A)를 구하고, 이를 중력가속도(g) 단위로 나눕니다.
통합 공식:
\[A_{(g)} = \frac{2 \pi f V_{peak}}{9,810}\]계산:
\[A = \frac{2 \times 3.14 \times 2,000 \text{ Hz} \times 7.07 \text{ mm/sec}}{9,810 \text{ mm/sec}^2}\]분자 계산: $12,560 \times 7.07 \approx 88,799.2 \text{ mm/sec}^2$
\[A \approx \frac{88,799.2}{9,810} \approx 9.05 \text{ g's peak}\]
요약:
이 예제는 RMS 속도를 Peak 값으로 변환($\times 1.414$)한 후, 주파수 성분을 곱하여($\times 2\pi f$) 가속도를 구하고, 최종적으로 중력가속도 단위로 환산($/ 9,810$)하는 복합적인 과정입니다.
속도에서 가속도로 변환할 때 RMS를 Peak로 먼저 바꾸는 이유와 전체 계산 흐름을 이해하셨습니까?
단순 진동 변환 계산
변위, 속도, 가속도의 관계는 본질적으로 미분과 적분의 관계입니다.
하지만 진동 분석에서 단순 조화 운동(Simple Harmonic Motion, 정현파)을 가정할 경우, 이 복잡한 미분 과정이 상수인 각주파수($2\pi f$)를 곱하는 대수적 연산으로 단순화됩니다.
그 이유와 순서에 대해 명확히 설명해 드리겠습니다.
1. 왜 미분 대신 곱셈을 하는가?
진동 신호를 사인파(Sine wave)라고 가정했을 때, 미분을 수행하면 진폭 앞에 주파수 성분($\omega$)이 튀어나오는 성질 때문입니다.
- 변위 ($D$): $x(t) = D \sin(\omega t)$
속도 ($V$): 변위를 시간($t$)으로 미분
\[v(t) = \frac{d}{dt} x(t) = \omega \cdot D \cos(\omega t)\]→ 여기서 위상(cos)을 제외하고 크기(진폭)만 보면, 속도는 변위 값에 $\omega$를 곱한 것과 같습니다.
가속도 ($A$): 속도를 시간($t$)으로 미분
\[a(t) = \frac{d}{dt} v(t) = -\omega^2 \cdot D \sin(\omega t)\]→ 마찬가지로 크기만 보면, 가속도는 속도 값에 또다시 $\omega$를 곱한 것입니다.
따라서, “진동의 크기(Peak, RMS)”만을 계산할 때는 복잡한 미분 기호 없이 각주파수 $\omega$ ($= 2\pi f$)를 곱하는 것으로 미분 값을 대신할 수 있습니다.
2. 변환 순서 및 계산 규칙
변환 순서는 미분(곱셈) 방향과 적분(나눗셈) 방향으로 나뉩니다. 기준은 주파수($f$)입니다.
① 미분 방향 (변위 → 속도 → 가속도)
- 상위 개념으로 갈수록 변화율이 커지므로 2$\pi f$를 곱합니다.
- 변위 → 속도: $V = D \times (2\pi f)$
- 속도 → 가속도: $A = V \times (2\pi f)$
- 변위 → 가속도: $A = D \times (2\pi f)^2$
② 적분 방향 (가속도 → 속도 → 변위)
- 하위 개념으로 갈수록 변화율이 누적되므로 $2\pi f$로 나눕니다.
- 가속도 → 속도: $V = A / (2\pi f)$
- 속도 → 변위: $D = V / (2\pi f)$
요약
- 원리: 사인파를 미분하면 주파수($2\pi f$)가 상수로 튀어나오는 수학적 성질을 이용합니다.
- 순서: 변위에서 가속도로 갈 때는 곱셈($\times 2\pi f$), 가속도에서 변위로 갈 때는 나눗셈($/ 2\pi f$)을 수행합니다.